
While some DRC teams received fancy ATLAS robots from DARPA and other teams decided to adapt existing platforms (HUBO and HRP-2, for example) to compete in the Finals, some groups set out to build completely new robots. One of these is Team WALK-MAN from the Italian Institute of Technology (IIT), whose most recent robotic creations include HyQ and COMAN. Before departing to the DRC Finals site in Pomona, Calif., Nikos Tsagarakis, a senior researcher at IIT and WALK-MAN Project Coordinator, spoke with us about his team’s highly customized robot, its mains capabilities, and how it compares to ATLAS.
To design and build WALK-MAN, did you get inspiration from other robots? Which ones?
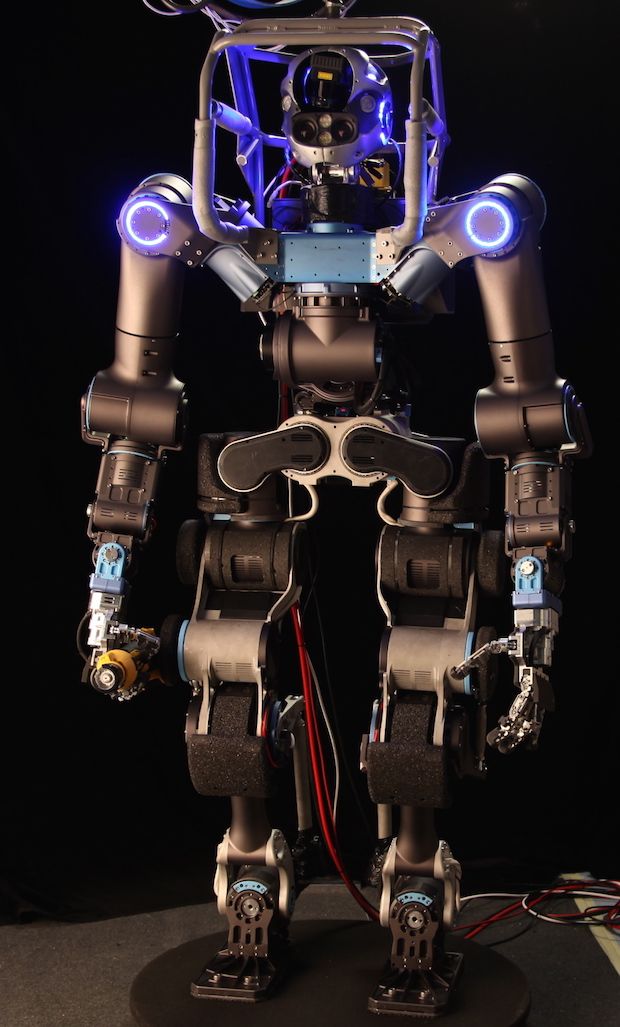
WALK-MAN was developed as part of the European Commission-funded Project WALK-MAN, and the goal was creating a completely original and new body design, so it is different from any other existing robot we developed so far at IIT. Apart from following our traditional approach to soft robot design by adding joint elasticity to the robot’s joints, WALK-MAN’s hardware is 100 percent new. Its main features include the use of custom designed high-power motor drives able to deliver several kilowatts of peak power at a single joint. We also optimized the design of its body to reduce the inertia and mass and improve the dynamic performance of the robot. A rich sensory system gives us the state of the robot in terms of loads (joint torque sensing) and thermal sensing/fatigue for both the actuators and the electronics. In terms of control, WALK-MAN drives can be controlled in different modes including position, torque, and impedance at rates up to 5 kHz.
How does WALK-MAN compare to ATLAS?
The two robots differ in their actuation system (WALK-MAN is an electrical motor driven robot while ATLAS is a hydraulic system) but are very similar in certain dimensions like height (1.85 m) and shoulder distance (0.8 m). WALK-MAN is lighter (120 kg with backpack) than Atlas (around 180 kg). In terms of capabilities, WALK-MAN joint performance is very close to ATLAS joints. Leg joints can produce torques up to 320 Nm and reach velocities of 11 to 12 radians per second at torques as high as 250 Nm. WALK-MAN arms have more extensive range and can generate torques up to 140 Nm at the shoulder level. We also expect to be a more efficient robot than ATLAS and able to operate for more prolonged periods without recharging.
No comments:
Post a Comment